042-365-0611
お問い合わせフォーム
今回は、オムロン製NJシリーズPLCを用いたIAI製ロボシリンダーの制御の納入事例についてご紹介いたします。
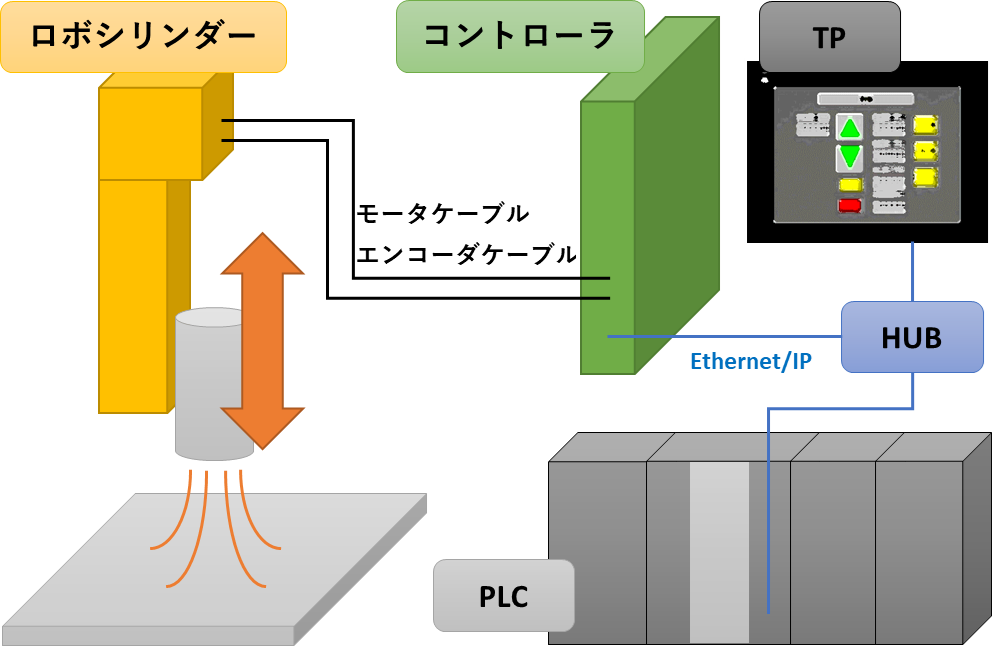
今回扱った装置は、加工物に吹き付けるガスを噴射するノズルをロボシリンダーによって昇降させる機能を持っています。ロボシリンダーはIAI製で、同社製のコントローラであるPCON-CBを経由して、オムロン製NJシリーズPLCによって制御されます。オムロン製NSシリーズのタッチパネルがPLCに接続されていて、タッチパネル上から昇降動作を操作できるようになっています。
ロボシリンダーとは、電気的な制御によって伸縮動作を実現する装置です。
ロボシリンダーの内部にはサーボモータとボールねじが入っており、サーボ技術の応用によって高精度の位置決めを実現しています。制御の面でも、サーボ機構制御と共通する考え方が多いように感じました。なお、サーボ機構制御の技術紹介のページもございますので、ぜひそちらもご覧ください。
制御のしくみを位置決め制御を例にとって説明します。
PLCで位置決め指令を発行するとコントローラに伝送され、コントローラからロボシリンダーの内部のサーボモータに電流が出力されます。コントローラでは並行してサーボモータのエンコーダからロボシリンダーの移動量を取得し、コントローラの側で位置決めが完了したと判断したらサーボモータへの電流出力を止め、PLCに位置決め完了信号を返す、という流れになります。
PLCとコントローラの通信はEthernet/IPを使って行いました。Ethernet/IPでコントローラに接続するには、コントローラとロボシリンダーのメーカであるIAI社が公開しているEDS(Electronic Data Sheet)ファイルを入手して、PLCのプロジェクトファイルにEDSファイルをインストールする必要があります。
今回使用したNJシリーズでは、プログラミングツールとしてSysmac Studioを使用します。私が使用するのは初めてのソフトでした。
Sysmac Studioは、当社で最も使用する機会の多い三菱電機製のGX Works2や、同じオムロン製のCX-Programmerとも操作感や考え方が異なる独特のソフトです。例えば、デバイスを指定するときには基本的には変数名を使うことになっているので、GX Works2であればM100、X10とか、CX-ProgrammerであればW10.0、1.0とかのように、メモリ領域を直接指定するやり方で書く方法に慣れている作業者にとっては、少しとっつきにくい面があるかもしれません。
しかし、技術的に進んでいると感心する部分もありました。一例を挙げると、共用体が使用できることです。共用体とは、複数の型の変数を1つのグループとして宣言し、その共用体をユーザ定義のデータ型として使用する考え方です。構造体と似ていますが、構造体と違うのは同じメモリ領域に対して、あるときはワード単位、あるときはビット単位で読み書きするというように、書き方によって違う型の変数として扱うことができる点です。
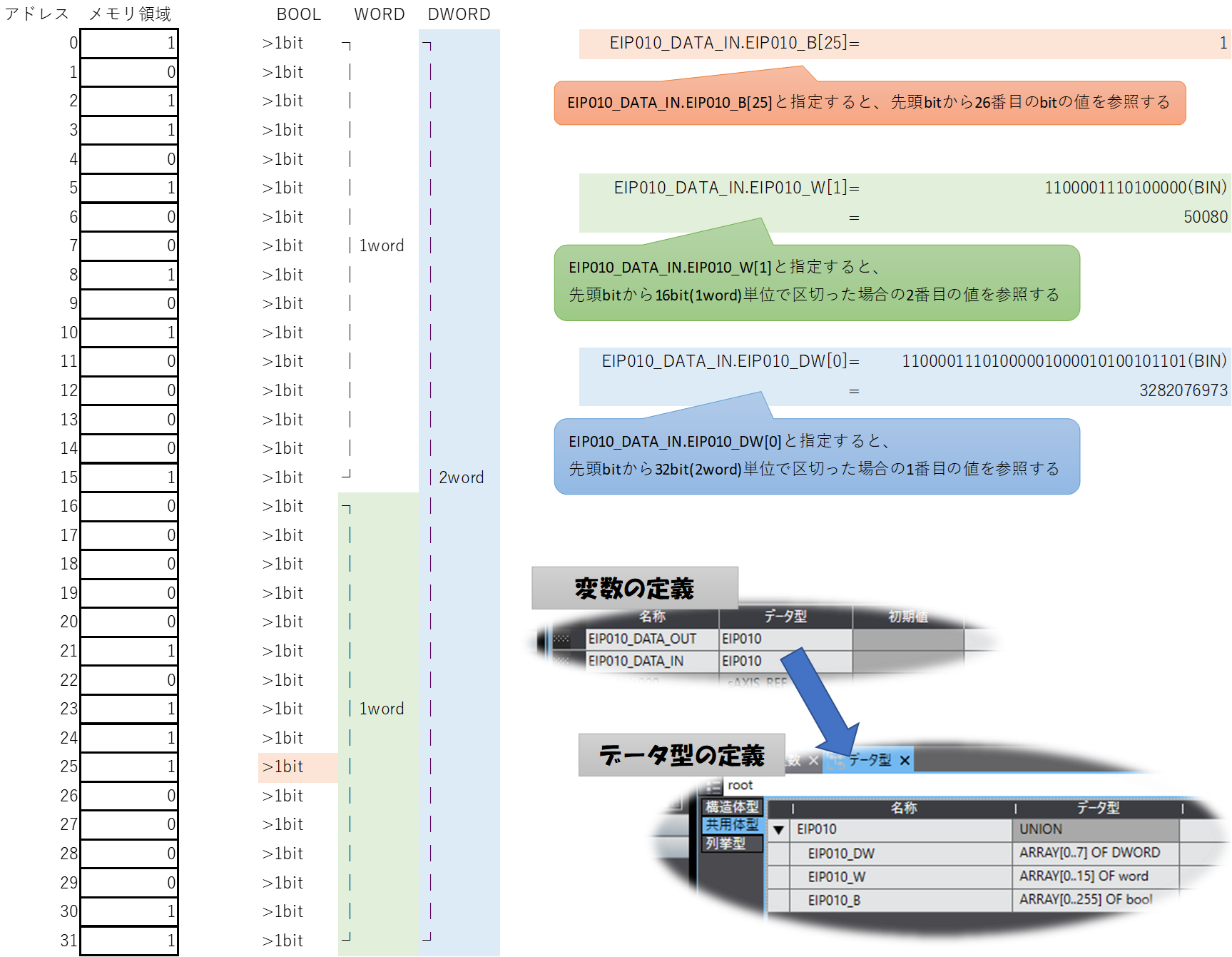
今回は、Ethernet/IPでPLCとコントローラの通信をする部分に共用体を使用しました。コントローラとの通信は上りと下りでそれぞれ32バイトですが、位置決め座標のような数値データをやりとりするときと、位置決め完了信号のようなビットデータをやりとりするときがあります。このような処理をシンプルに実装するために、ダブルワード型8要素の配列、ワード型16要素の配列、ブール型256要素の配列をメンバに持つ共用体型を宣言し、この共用体型変数をEthernet/IPでやりとりしました。ダブルワード型8要素の配列、ワード型16要素の配列、ブール型256要素はいずれも容量は32byteで、これらが同じ32byteのメモリ領域を共用しています。
現地調整では、実際に設備を動かして頂きながらプログラムの調整や追加修正を行います。
今回の設備は既に使用されている既設設備の改造だったのですが、今回の作業の為に設備を使用しない日を数日間作っていただくことができました。そのお陰で、作業に時間的な余裕が生まれ、技術的にも様々な機能を実際に検証しながら進めることで品質の安定化を図れました。また、当初ご要望のあった仕様の他にも、実際に作業をする方の手順を観察し、ヒアリングをして必要と思われる仕様をこちらから提案し追加するなど、柔軟な対応ができたと思います。
ロボシリンダーは私にとって初めての制御対象であり、Sysmac Studioの使用も初めての経験となりましたが、サーボ機構制御の経験を活かしてスムーズに対応できました。
現在の当社の売上構成ではプラント系の割合が高くなっておりますが、このようなメカ制御にも対応可能です。昨今の円安局面や世界情勢によるサプライチェーンの不安定化を受けた製造業の国内回帰、国内の製造現場における慢性的な人手不足という状況を鑑みると、メカ系の自動制御の需要もこの先増していくと思われますので、当社としてもぜひ貢献していきたい所存です。このようなシステムでのお話がございましたらお気軽にご相談下さい。
Copyright © 2024 TAHARA ELECTRIC CO., LTD. all right reserved

